Search Results for: failure
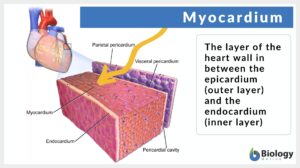
Myocardium
Myocardium Definition What is the myocardium of the heart? It is the muscular middle layer of the heart that is... Read More

Treatment failure
treatment failure A measure of the quality of health care by assessing the unsuccessful results or consequences of... Read More
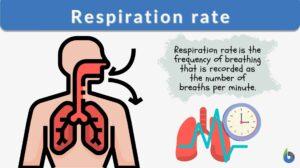
Respiration rate
Respiration Rate Definition Respiration rate is a vital life process that expresses the breathing rate in an organism... Read More
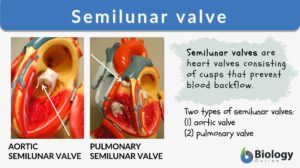
Semilunar valve
The human heart structure consists of heart chambers (2 atria and 2 ventricles) that differ functionally from each other.... Read More

Circulation
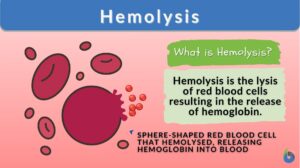
Blood Blood is composed of a liquid, plasma, and blood cells such as erythrocytes (red blood cells,) leukocytes (white... Read More
Nondisjunction
Definition noun (In mitosis) The failure of sister chromatids to separate during and after mitosis. (In meiosis) The failure... Read More
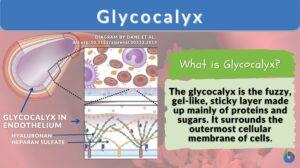
Glycocalyx
What is the Glycocalyx? The glycocalyx is a polysaccharide-based gel-like, highly hydrous cellular thin layer, covering... Read More
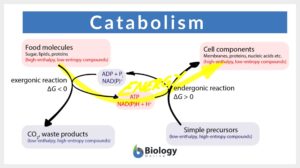
Catabolism
Catabolism Definition Catabolism is the branch of the metabolic process that breaks down complex, big molecules into... Read More
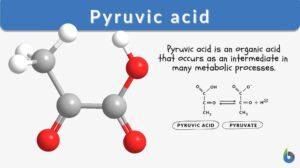
Pyruvic acid
What is Pyruvic Acid? Pyruvic acid is an organic acid that occurs as an intermediate in many metabolic processes. It occurs... Read More
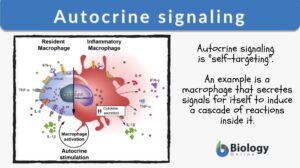
Autocrine signaling
Autocrine Signaling Definition What is autocrine signaling? Autocrine signaling is a type of cell signaling wherein a cell... Read More
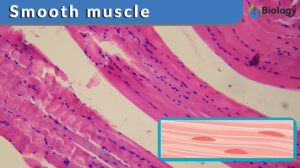
Smooth muscle
The smooth muscle can be described as a type of muscle in the human body that is non-striated and involuntary in action.... Read More
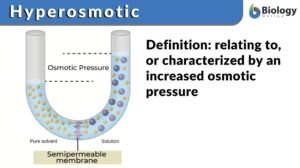
Hyperosmotic
Hyperosmotic Definition What is hyperosmotic? The word hyperosmotic is derived from two Greek words: 'hyper', meaning... Read More
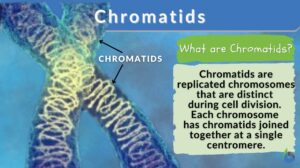
Chromatids
Chromatid Definition Chromatids are found inside our cells. Chromatids are condensed chromosomes distinguishable during... Read More
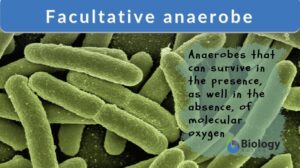
Facultative anaerobe
Facultative Anaerobe Definition What does facultative anaerobe mean? Facultative organisms are the most adaptable... Read More
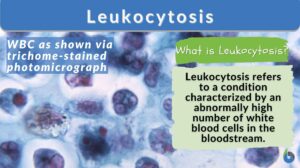
Leukocytosis
What Is Leukocytosis? Leukocytosis is a condition wherein the number of White Blood Cells (WBCs) is increased above the... Read More
Artificial passive immunity
Definition noun A passive immunity acquired by means of injection of serum containing antibodies to an individual who may... Read More
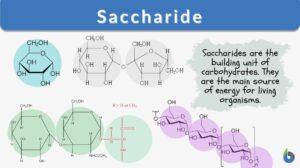
Saccharide
Saccharide Definition What is a saccharide molecule? A saccharide is the unit structure of carbohydrates. In biochemistry,... Read More
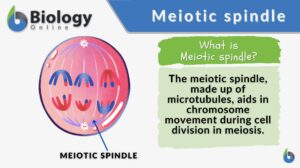
Meiotic spindle
Meiotic Spindle Definition The meiotic spindle refers to the spindle apparatus that forms during meiosis in contrast to... Read More
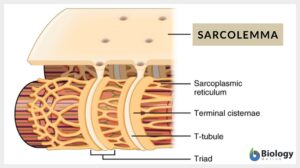
Sarcolemma
Sarcolemma Definition What is the sarcolemma? It is the thin, transparent, extensible plasma membrane of the muscle cell.... Read More
Rachischisis
Definition noun The embryological failure of the neural tube to fuse or close completely thereby resulting in the vertebrae... Read More
Hybrid Sterility
'''hybrid sterility (genetics) It refers to the offspring of a successful primary cross, however the secondary cross would... Read More
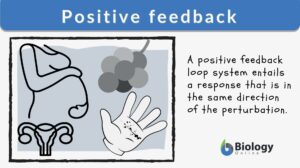
Positive feedback
Positive Feedback Definition Each mechanism of the body like temperature, blood pressure, and levels of specific nutrients... Read More
Erythropoietin
Definition noun, plural: erythropoietins A glycoprotein hormone that regulates the production of red blood cells in the bone... Read More
Vibrio cholerae
Definition Noun A gram-negative single polar flagellum bacterium associated with cholera infection in... Read More
Past-pointing
Definition noun An assessment test performed to evaluate the upper extremity tonic balance (e.g. the functional integrity of... Read More

Regulation of Biological Systems
Regulation of Biological Systems tutorials are focused on the modulation of biological systems from cell to population... Read More
coronavirus COVID-19
Coronavirus Disease 2019 (COVID-19) Coronavirus Disease 2019 (COVID-19) is a contagious coronavirus disease first detected... Read More

Why Is The Mary River Turtle Endangered
The Mary River Turtle (Elusor macrurus) has been named recently as one of the species on the brink of extinction. That is... Read More
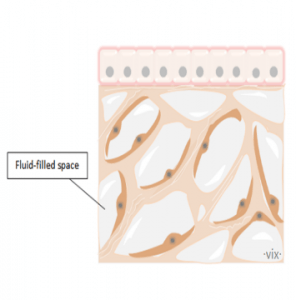
The interstitium – a new biological organ?
Scientists found, apparently by accident, a new biological organ and they want it called "interstitium". The discovery was... Read More

Genetic Control – On and Off Genes
Reviewed by: Mary Anne Clark, Ph.D. This lesson looks at the various factors involved that affect growth and... Read More
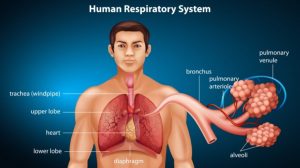
Respiration
Organization of the Respiratory System Each lung is composed of air sacs called alveoli - the sites of gas exchange with... Read More


Genetic Information and Protein Synthesis
Genetic Code Genes are sequences of DNA nucleotides that carry and transmit the information specifying amino acid sequences... Read More

Non-living thing
Non-living Thing Definition A non-living thing in biology means any form without a life, such as an inanimate body or... Read More